作者:李飞腾链接:https://zhuanlan.zhihu.com/p/22473137
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。如果能二秒内在脑袋里解出下面的问题,本文便结束了。
已知:
求:
到这里,请耐心看完下面的公式推导,无需长久心里建设。
首先,反向传播的数学原理是“求导的链式法则” :
设
接下来介绍
矩阵、向量求导的维数相容原则
利用维数相容原则快速推导反向传播
编程实现前向传播、反向传播
卷积神经网络的反向传播
快速矩阵、向量求导
这一节展示如何使用链式法则、转置、组合等技巧来快速完成对矩阵、向量的求导
一个原则维数相容,实质是多元微分基本知识,没有在课本中找到下列内容,维数相容原则是我个人总结:
维数相容原则:通过前后换序、转置 使求导结果满足矩阵乘法且结果维数满足下式:
如果
利用维数相容原则解上例:
step1:把所有参数当做实数来求导,
依据链式法则有
可以看出除了
step2:根据step1的求导结果,依据维数相容原则做调整:前后换序、转置
依据维数相容原则
同理:
对于矩阵、向量求导:
“当做一维实数使用链式法则求导,然后做维数相容调整,使之符合矩阵乘法原则且维数相容”是快速准确的策略;
“对单个元素求导、再整理成矩阵形式”这种方式整理是困难的、过程是缓慢的,结果是易出错的(不信你试试)。
如何证明经过维数相容原则调整后的结果是正确的呢?直觉!简单就是美...快速反向传播:
神经网络的反向传播求得“各层”参数
接下来,展示不使用下标的记法(
这里的标号,参考UFLDL教程 - Ufldl
前向传播:
设神经网络的损失函数为
如何求
那么我们可以从最顶层逐层往下,便可以递推求得每一层的
注意:
反向传播整个流程如下:
- 进行前向传播计算,利用前向传播公式,得到隐藏层和输出层 的激活值。
-
对输出层(第
l
层),计算残差:
\delta ^{(l)} =\frac{\partial J(W,b)}{\partial z^{(l)}} (不同损失函数,结果不同,这里不给出具体形式)
- 对于
l-1, l-2 , ... , 2 的隐藏层,计算:
\delta ^{(l)}=\frac{\partial J}{\partial z^{(l)}}=\frac{\partial J}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial a^{(l)}}\frac{\partial a^{(l)}}{\partial z^{(l)}}=((W^{(l)})^{T}\delta ^{(l+1)}) \cdot f'(z^{(l)}) 4) 计算各层参数
W^{(l)} 、
b^{(l)} 偏导数:
\bigtriangledown_{W^{(l)}}J(W,b)=\frac{\partial J(W,b)}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial W^{(l)}}=\delta ^{(l+1)}(a ^{(l)})^T
\bigtriangledown_{b^{(l)}}J(W,b)=\frac{\partial J(W,b)}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial b^{(l)}}=\delta ^{(l+1)} 编程实现
大部分开源library(如:caffe,Kaldi/src/{nnet1,nnet2})的实现通常把f() 作为一个layer(如:sigmoid、relu、softplus、softmax)。
反向传播时分清楚该层的输入、输出即能正确编程实现,如:
z^{(l+1)}=W^{(l)}a^{(l)}+b^{(l)} (公式1)
a^{(l+1)} =f(z^{(l+1)}) (公式2)
(1)式AffineTransform/FullConnected层,以下是伪代码:
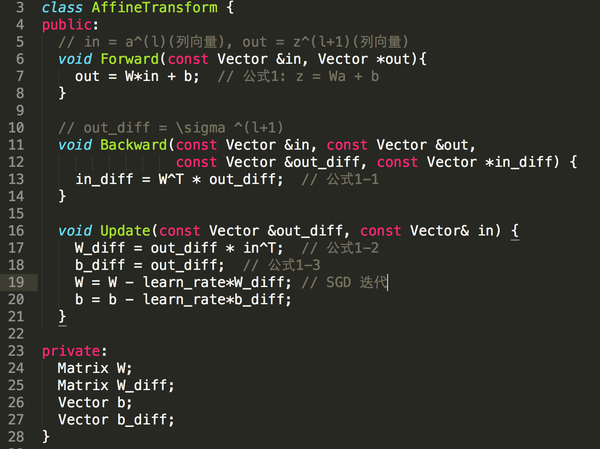 注: out_diff =
注: out_diff =
\frac{\partial J}{\partial z^{(l+1)}} 是上一层(Softmax 或 Sigmoid/ReLU的 in_diff)已经求得:
in_diff = \frac{\partial J}{\partial a^{(l)}} = \frac{\partial J}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial a^{(l)}} = W^T * out_diff (公式 1-1)
W_diff =\frac{\partial J}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial W^{(l)}} = out_diff * in^T (公式 1-2)
b_diff =\frac{\partial J}{\partial z^{(l+1)}} \frac{\partial z^{(l+1)}}{\partial b^{(l)}} = out_diff * 1 (公式 1-3)
(2)式激活函数层(以Sigmoid为例)
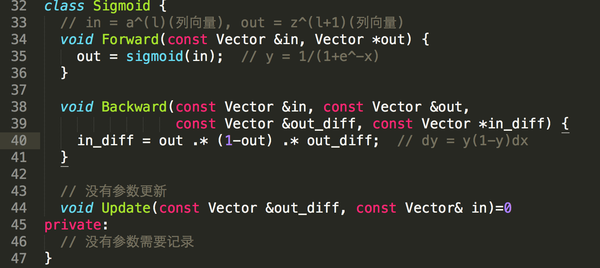 注:out_diff =
注:out_diff =
\frac{\partial J}{\partial a^{(l+1)}} 是上一层AffineTransform的in_diff,已经求得,
in_diff = \frac{\partial J}{\partial z^{(l+1)}} = \frac{\partial J}{\partial a^{(l+1)}} \frac{\partial a^{(l+1)}}{\partial z^{(l+1)}} = out_diff \cdot out \cdot (1-out) 在实际编程实现时,in、out可能是矩阵(通常以一行存储一个输入向量,矩阵的行数就是batch_size),那么上面的C++代码就要做出变化(改变前后顺序、转置,把函数参数的Vector换成Matrix,此时Matrix out_diff 每一行就要存储对应一个Vector的diff,在update的时候要做这个batch的加和,这个加和可以通过矩阵相乘out_diffinput(适当的转置)得到。
如果熟悉SVD分解的过程,通过SVD逆过程就可以轻松理解这种通过乘积来做加和的技巧。
丢掉那些下标记法吧!
卷积层求导
卷积怎么求导呢?实际上卷积可以通过矩阵乘法来实现(是否旋转无所谓的,对称处理,caffe里面是不是有image2col),当然也可以使用FFT在频率域做加法。
那么既然通过矩阵乘法,维数相容原则*仍然可以运用,CNN求导比DNN复杂一些,要做些累加的操作。具体怎么做还要看编程时选择怎样的策略、数据结构。
快速矩阵、向量求导之维数相容大法已成










网友评论